


Pengenalan kepada Bahan PEEKPenderia Robot
PEEK (Polyether Ether Ketone) ialah plastik kejuruteraan khusus berprestasi tinggi dengan sifat seperti rintangan suhu tinggi (suhu perkhidmatan jangka panjang sekitar 240°C), rintangan kakisan kimia, kekuatan tinggi, ringan, pekali geseran rendah dan penebat elektrik yang sangat baik. Kelebihan ini menjadikannya bahan yang ideal untuk komponen utama penderia robot, menangani kekurangan logam tradisional atau penderia plastik biasa dari segi ketepatan, kestabilan dan kebolehsuaian alam sekitar.
I. Jenis dan Ciri Aplikasi Teras
Bahan PEEK berfungsi terutamanya dengan menghasilkan komponen struktur teras atau substrat berfungsi penderia. Jenis aplikasi biasa adalah seperti berikut:
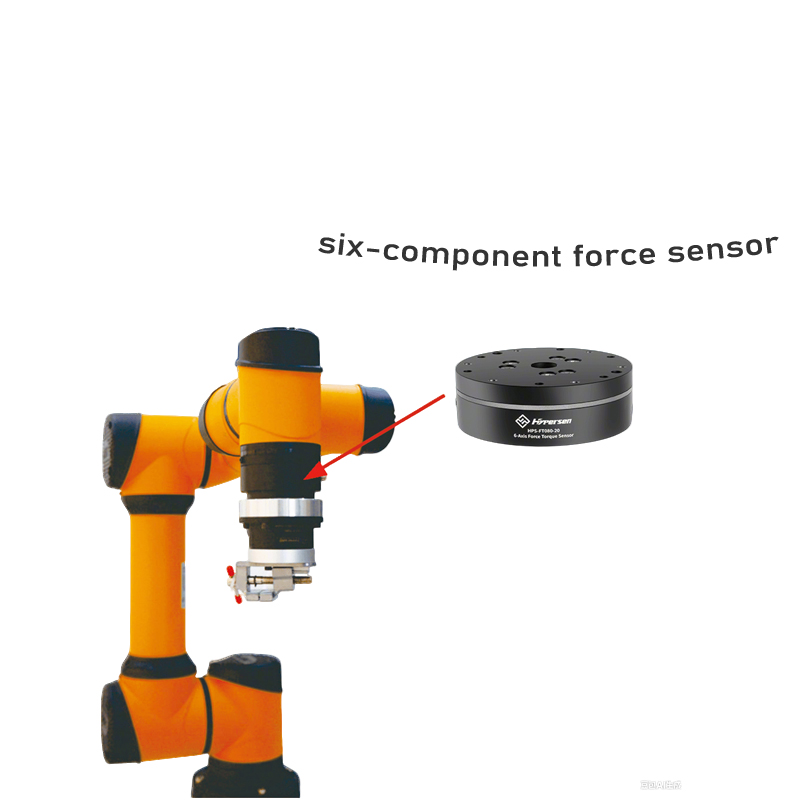
1. Penderia Daya/Tork Enam Dimensi
Bahagian Aplikasi: Badan "elastik" (komponen teras untuk persepsi isyarat daya) sensor.
Nilai Teras: Badan anjal tradisional kebanyakannya diperbuat daripada aloi aluminium, manakala PEEK mempunyai nisbah modulus elastik kepada ketumpatan yang lebih baik - memastikan kekuatan struktur sambil mengurangkan jisim badan anjal dengan ketara, meminimumkan gangguan inersia semasa pergerakan robot dan meningkatkan ketepatan pengukuran daya (sehingga ±0.1% FS) dan kelajuan tindak balas dinamik masa (masa tindak balas).
Senario Biasa: Pemasangan robot industri (seperti kawalan daya pengetatan skru yang tepat), interaksi manusia-mesin robot kolaboratif (seperti persepsi daya perlanggaran), maklum balas daya pembedahan robot perubatan (seperti pemantauan daya pengisaran permukaan tulang dalam robot ortopedik).

2. Sensor Sentuhan/Tekanan
Bahagian Aplikasi: Substrat fleksibel atau pembawa elektrod sensor.
Nilai Teras: PEEK mempunyai fleksibiliti dan rintangan keletihan tertentu, membolehkan ia diproses menjadi bentuk nipis atau tidak teratur, sesuai untuk senario sentuhan melengkung atau fleksibel seperti jari robot dan penggenggam; pada masa yang sama, penebat elektriknya boleh menghalang gangguan isyarat, memastikan kestabilan data sentuhan (seperti tekanan, pengecaman tekstur) atau ketegangan (seperti ubah bentuk sendi).
Senario Lazim: Persepsi tekanan dalam robot servis apabila menggenggam barang rapuh (seperti kaca, buah-buahan), pemantauan terikan untuk kesesuaian dalam pemasangan fleksibel robot industri.
3. Penderia Khusus untuk Persekitaran Menghakis
Bahagian Aplikasi: Perumah, lengan perlindungan probe, atau komponen sentuhan sensor.
Nilai Teras: PEEK mempunyai rintangan yang sangat kuat terhadap asid, alkali, pelarut organik dan wap suhu tinggi (seperti pembersihan CIP dalam industri makanan), jauh lebih baik daripada keluli tahan karat atau plastik biasa, melindungi komponen dalaman penderia daripada kakisan dan memanjangkan hayat perkhidmatannya.
Senario Biasa: Penderia paras/kepekatan cecair dalam robot makanan/perubatan (seperti memantau paras cecair dalam tangki sos), penderia parameter persekitaran dalam robot kimia (seperti melindungi probe pengesanan gas yang menghakis).
II. Kelebihan Teras berbanding Bahan Tradisional

III. Medan Aplikasi Biasa
Robot industri: Kawalan daya pemasangan, maklum balas daya pengisaran, pemantauan tekanan genggam;
Robot perubatan: Daya persepsi terhadap instrumen pembedahan (seperti maklum balas daya dalam operasi laparoskopi), pemantauan ketegangan sendi robot pemulihan;
Robot khas: Penderia persekitaran tahan kakisan dalam medan makanan/kimia, penderia suhu/daya dalam keadaan suhu tinggi (seperti kimpalan automotif).











